|
Autoware Installation using Docker image Installation process of the Autoware software is based on the description of the installation from Autoware web-site: https://github.com/CPFL/Autoware/wiki/Docker Docker Image is based on twbabyduck/autoware:1.9.1-kinetic-opengl image developed by user twbabyduck
1. Install Ubuntu 16.04
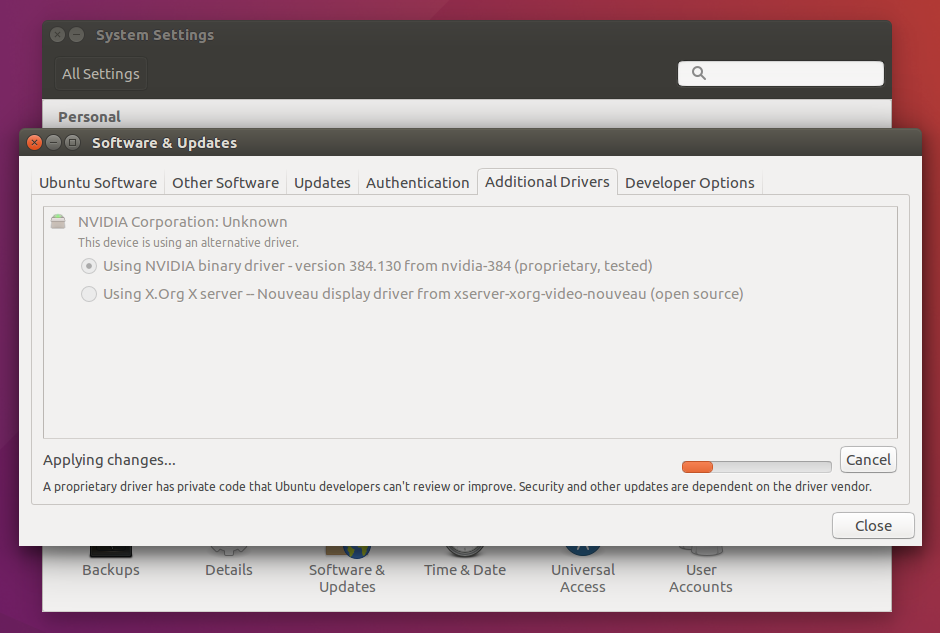
2. Install Nvidia priopretary, binary driver (Ubuntu System Settings):
3. Setup Docker CE - follow Docker's installation website and follow paragraph Install using the repository. At the end of the installation process verify that Docker CE is installed correctly by running the hello-world image:
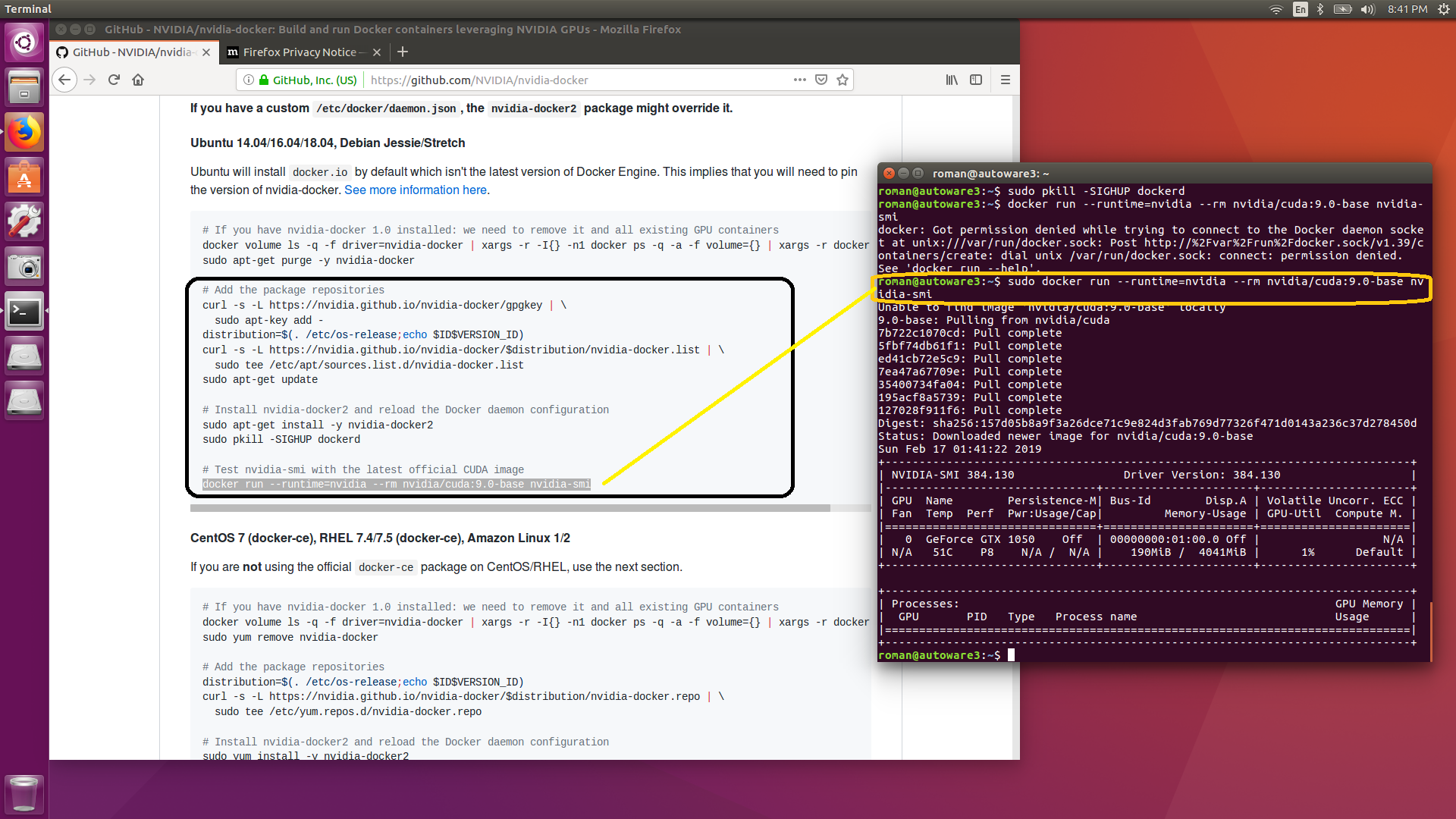
4. Install Docker Plugin provided by NVIDIA in order to access NVIDIA GPUs from Docker Container. Follow these nvidia-docker instructions
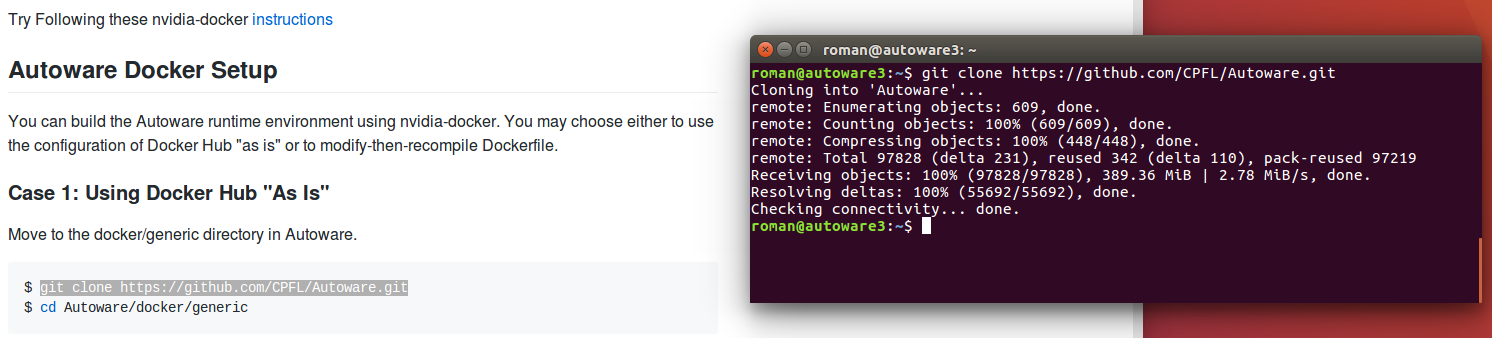
5. Clone Autoware GitHub repository: git clone https://github.com/CPFL/Autoware.git
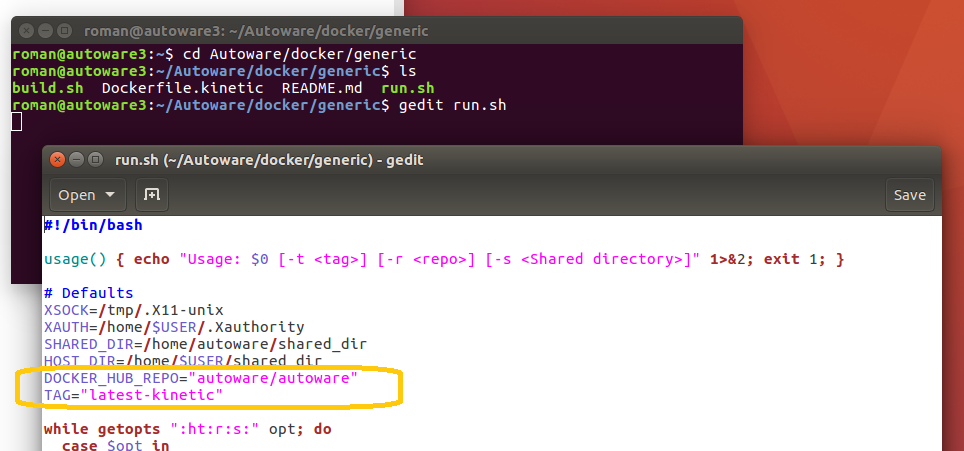
$ cd Autoware/docker/generic
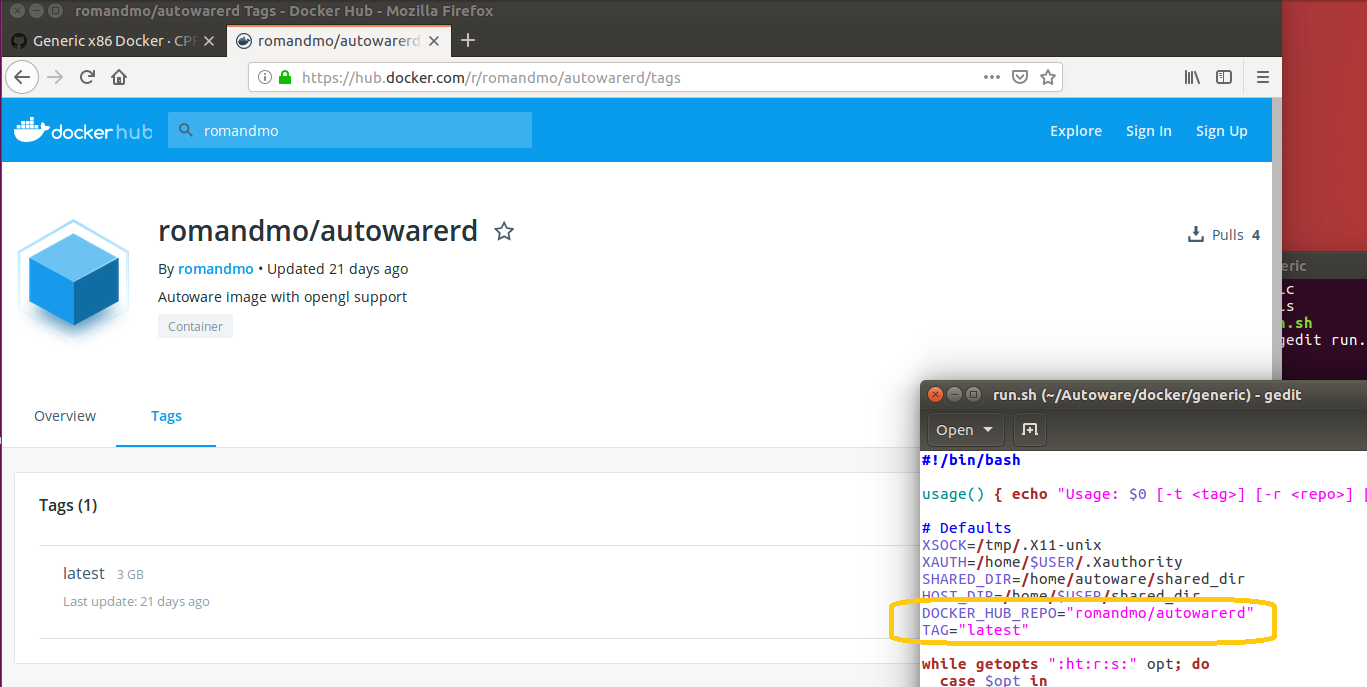
6. Change the Docker Image name in run.sh file (in /Autoware/docker/generic/ directory): From "autoware/autoware:latest kinetic":
To "romandmo/autowarerd:latest" :
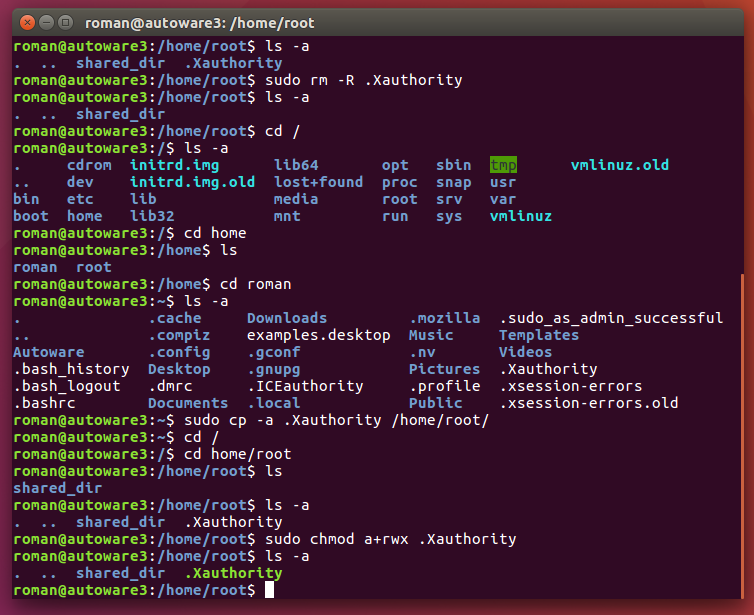
7. In /Home/root/ folder create .Xathority file: - from /home/root/ folder remove unnecessary folder .Xauthority - from your user folder e.g. /home/user/ copy file .Xauthority to folder /home/root/ - assign necessery permission to file .Xauthority in /home/root/ folder sudo chmod a+rwx .Xauthority Below you can find a complete list of all necessery commands (where user name: roman):
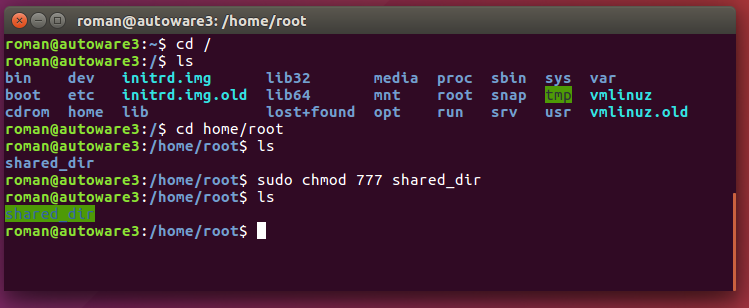
8. In /home/root/ folder add necessery permission to folder "shared_dir": sudo chmod 777 share_dir
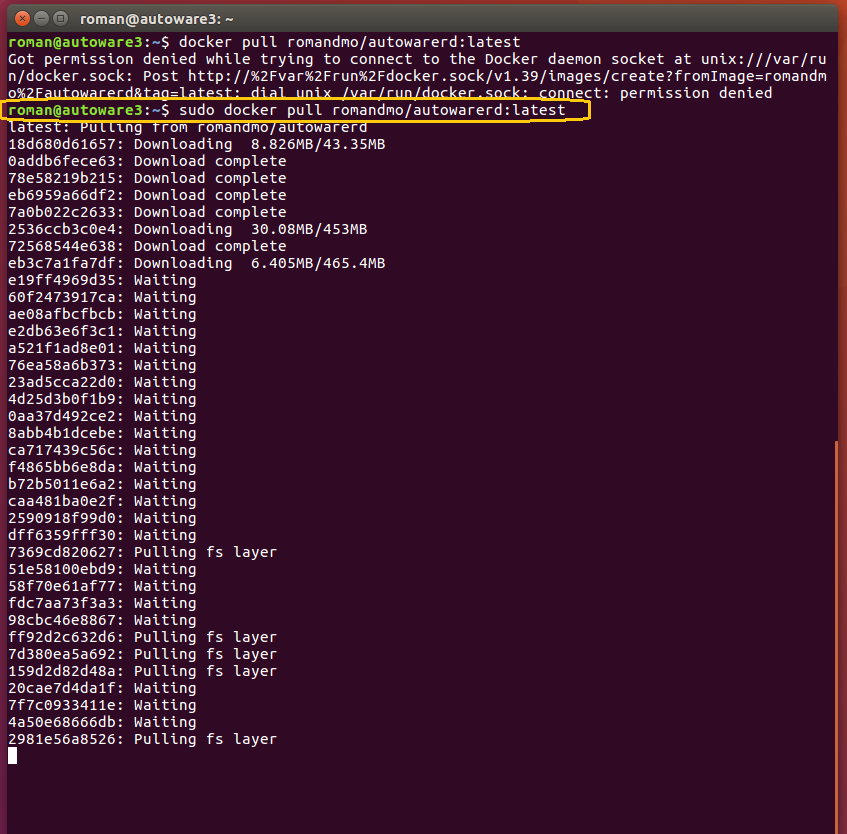
9. Download Docker Image of Autoware: sudo docker pull romandmo/autowarerd:latest
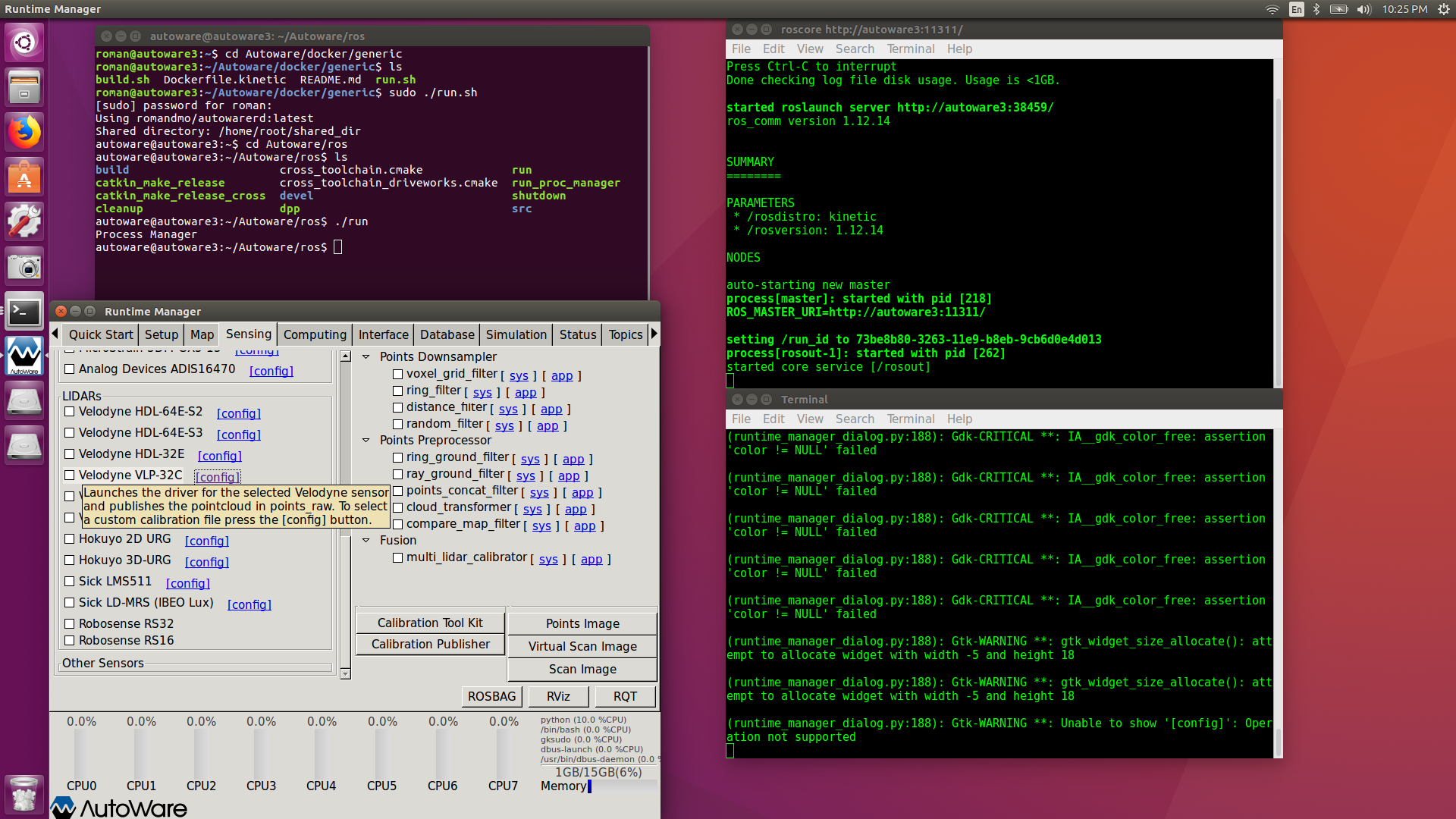
10. Run the Autoware Docker Image: cd Autoware/docker/generic
sudo ./run.sh Inside the Docker run the Autoware: autoware@autoware3:~$ cd Autoware/ros autoware@autoware3:~/Autoware/ros$ ./run
The full description of Autoware system you can find at Autoware web-site: https://www.autoware.ai/ |
|